



introduction
Profibus의 역사는 1986년 21개 회사/Institute로 결성 된 협회를 통해서 공적으로 추진한 Master Project Plan에 기원하는데, 이 Plan을 "Fieldbus"라
칭하게 됩니다. 그들은 2개 Type을 개발 했는데, Profibus-FMS는 마스터간에 Non-deterministic 통신을 위한 것이고, Profibus-DP는 마스터와 Remote
I/O Slave간에 Deterministic한 통신을 위한 것입니다.
Profibus는 Multi 마스터 시스템으로써 하나의 버스 상에 여러 Controller, 엔지니어링 Tool, Visualization 시스템 같은 마스터가 분산 된 Peripheral과 연결되어 공동작업을 할 수 있습니다.
Profibus에는 다음과 같은 유형의 Device들이 존재 합니다.
마스터: Device는 버스상의 데이터 통신을 결정합니다.
마스터는 버스 액세스 권한 (토큰)를 보유하고 있을 때, 외부 요청 없이 메시지를 보낼 수 있습니다. 마스터는 Active station이라고 불립니다.
슬레이브: I/O 장치, 밸브, Drive, 측정 장치와 같은 주변 장치를 가리킵니다.
슬레이브는 버스 액세스 권한이 없으며, 수신 된 메시지에 대한 Acknowledge 혹은 Response 만을 할 수 있습니다.
슬레이브는 Passive station 이라고 불리며, 버스 프로토콜의 작은 기능만을 필요로 하기 때문에, 경제적인 실장이 가능합니다.
Profibus는 Multi 마스터 시스템으로써 하나의 버스 상에 여러 Controller, 엔지니어링 Tool, Visualization 시스템 같은 마스터가 분산 된 Peripheral과 연결되어 공동작업을 할 수 있습니다.
Profibus에는 다음과 같은 유형의 Device들이 존재 합니다.
마스터: Device는 버스상의 데이터 통신을 결정합니다.
마스터는 버스 액세스 권한 (토큰)를 보유하고 있을 때, 외부 요청 없이 메시지를 보낼 수 있습니다. 마스터는 Active station이라고 불립니다.
슬레이브: I/O 장치, 밸브, Drive, 측정 장치와 같은 주변 장치를 가리킵니다.
슬레이브는 버스 액세스 권한이 없으며, 수신 된 메시지에 대한 Acknowledge 혹은 Response 만을 할 수 있습니다.
슬레이브는 Passive station 이라고 불리며, 버스 프로토콜의 작은 기능만을 필요로 하기 때문에, 경제적인 실장이 가능합니다.
Protocol Architecture
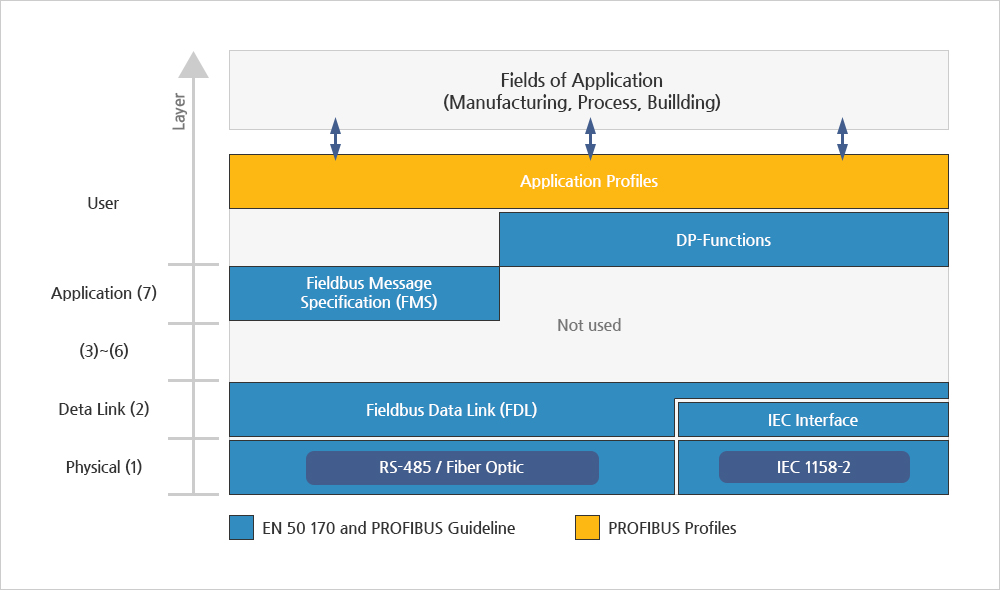
Profibus 는 국제 표준에 기반을 두고 있기 때문에, 프로토콜 구조는 국제 표준 ISO 7498에 따른 OSI (Open System Interconnection) 참조 모델을 따르고 있습니다. 이 모델에서는 모든 Transmission layer가 정확하게 정의 된 태스크를 처리하고 있습니다. Layer 1 (Physical layer)은 물리적 전송 특성을, Layer 2 (Data link layer)는 버스 액세스 프로토콜을 , Layer 7 (Application layer) 은 어플리케이션 기능을 정의하고 있습니다. DP는 효율적인 통신 프로토콜로서 Layers 1 , 2 및 User interface로 구성 되어 있습니다.
Protocol Architecture
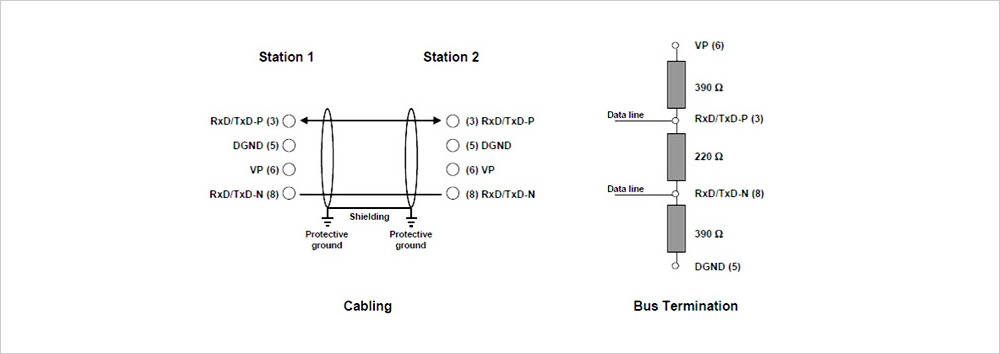
- RS-485 Transmission Technology
Profibus 는 국제 표준에 기반을 두고 있기 때문에, 프로토콜 구조는 국제 표준 ISO 7498에 따른 OSI (Open System Interconnection) 참조 모델을 따르고 있습니다. 이 모델에서는 모든 Transmission layer가 정확하게 정의 된 태스크를 처리하고 있습니다. Layer 1 (Physical layer)은 물리적 전송 특성을, Layer 2 (Data link layer)는 버스 액세스 프로토콜을 , Layer 7 (Application layer) 은 어플리케이션 기능을 정의하고 있습니다.
DP는 효율적인 통신 프로토콜로서 Layers 1 , 2 및 User interface로 구성 되어 있습니다.
DP는 효율적인 통신 프로토콜로서 Layers 1 , 2 및 User interface로 구성 되어 있습니다.
- Cables
DP에서는 Type A Cable을 사용하며, 그 특성은 다음과 같습니다. 이 Cable은 세계 유수의 업체에서 제공하고 있습니다.

Data Link Layer
Profibus 에서는 Layer 2를 Fieldbus Data Link (FDL) 이라고 부릅니다. 여기서 Medium Access Control (MAC)은 국이 데이터 송신권을 획득하는 절차를 정의하고 있으며, MAC은 어떤 시점에 있어 오직 하나의 국만이 송신권을 가질 수 있도록 보장해야만 합니다.
이것을 위해서 다음 2가지 방법이 사용됩니다.
이것을 위해서 다음 2가지 방법이 사용됩니다.

Profibus layer 2 는 Connectionless mode로 동작하기 때문에, Peer-to-Peer 통신 외에도 Multi-peer 통신 (Broadcast and Multicast)도 가능합니다. 여기서, Broadcast communication는 하나의 Active station이 다른 모든 국 (마스터/슬레이브)에 Unacknowledged 메시지를 보내는 형태이고, Multicast communication은 하나의 Active station이 미리 정해진 어떤 그룹의 국들에게 (마스터/슬레이브)에게 Unacknowledged 메시지를 보내는 형태를 말합니다.
DP Communication Profile
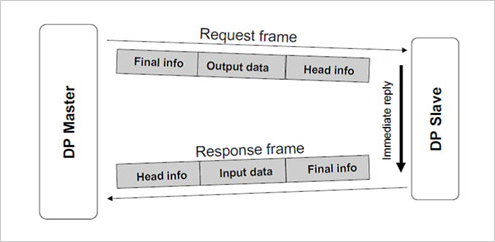
DP 통신 프로파일은 필드 레벨에서의 효율적인 데이터 교환을 위해 설계됐습니다.
DP 구성에서 중앙 컨트롤러 (마스터)는 주기적으로 슬레이브의 Input 정보를 읽고 주기적으로 슬레이브로 Output 정보를 쓰게 됩니다. 여기서 버스 사이클 시간은 반드시 중앙 컨트롤러 프로그램 사이클 시간보다 짧아야 하는데, 대부분의 애플리케이션에 있어 이 시간은 약 10 msec정도 됩니다. DP는 이러한 Cyclic 전송뿐만이 아니라 진단 및 시운전을 위한 강력한 기능을 제공합니다.
DP 구성에서 중앙 컨트롤러 (마스터)는 주기적으로 슬레이브의 Input 정보를 읽고 주기적으로 슬레이브로 Output 정보를 쓰게 됩니다. 여기서 버스 사이클 시간은 반드시 중앙 컨트롤러 프로그램 사이클 시간보다 짧아야 하는데, 대부분의 애플리케이션에 있어 이 시간은 약 10 msec정도 됩니다. DP는 이러한 Cyclic 전송뿐만이 아니라 진단 및 시운전을 위한 강력한 기능을 제공합니다.
- System Configuration 과 Devices Types
DP에서는 Mono-Master 혹은 Multi-Master system이 가능하며, 이것을 통해 System configuration상에 높은 수준의 유연성을 제공하게 됩니다.
DP는 최대 126 Device (마스터 or 슬레이브)가 하나의 버스에 연결될 수 있는데, System configuration 은 국의 개수, 여러 I/O 영역들에 배정된 해당 국번, I/O data의 Consistency, 진단 메세지의 형태, 그리고 Bus parameter등을 정의 하게 됩니다. 각 DP system 은 다음 세가지 Type의 Device로 구성됩니다.
1) DP 마스터 Class 1 (DPM1) : 분산된 슬레이브와 Cyclic하게 정보를 교환하는 중앙 컨트롤러. (PLC/PC)
2) DP 마스터 Class 2 (DPM2) : 진단, 시운전등을 위해 Engineering, configuration 을 행하는 Device.
3) 슬레이브 : Peripheral device (I/O devices, drives, HMI, valves, measuring transducers) 로서 Input 정보를 수집하고, Output정보는 기기에 전달합니다.
Mono–Master systems은 버스상에 오직 하나의 마스터가 존재하는 시스템입니다. 통상 PLC등이 중앙 컨트롤러가 되며, 이러한 시스템이 가장 빠른 Bus cycle time을 가지게 됩니다.
Multi-Master System은 여러 개의 마스터가 하나의 버스상에 존재하는 형태입니다. 이러한 시스템은 하나의 DPM1 마스터 와 그에 속한 슬레이브, 그리고 DPM2 마스터들로 구성 됩니다. 여기서, 슬레이브상의 Input /Output image는 모든 마스터가 읽을 수 있지만 Output을 write할 수 있는 마스터는 오직 DPM1만이 가능합니다.
Multi-Master System은 여러 개의 마스터가 하나의 버스상에 존재하는 형태입니다. 이러한 시스템은 하나의 DPM1 마스터 와 그에 속한 슬레이브, 그리고 DPM2 마스터들로 구성 됩니다. 여기서, 슬레이브상의 Input /Output image는 모든 마스터가 읽을 수 있지만 Output을 write할 수 있는 마스터는 오직 DPM1만이 가능합니다.
- Cyclic Data Transmission (DPM1 <-> 슬레이브)
DPM1와 슬레이브 간의 데이터 전송은 정해진 반복 순서에 따라 DPM1에 의해 자동으로 실행됩니다. 버스 시스템을 구성 할 때, User는 Cyclic 전송에 있어 어느 슬레이브를 포함하고, 어느 슬레이브를 제외할 것인지를 DPM1에 정의하게 됩니다. DPM1과 슬레이브 간의 데이터 전송은 3개의 단계로 - Parameterization, Configuration, Data transfer phase - 이루어 지는데, 앞의 2 단계에서 마스터상의 계획된 Configuration과 Device상의 실제 Configuration이 일치되는지 체크하게 됩니다. 이 체크 과정에서, Device type, 데이터 길이, Input/Output 각각의 개수가 일치해야 합니다.
- System Configuration 과 Devices Types
두개 국간에 행해지는 데이터 전송 외에도 마스터는 제어 명령을 하나의 슬레이브, Group 슬레이브, 또는 모든 슬레이브에게 전송할 수 있는데,
이것을 Multi-cast 방식 이라고 합니다. 이 방법을 통하여 슬레이브 들에 대한 Event-controlled 동기화 (Sync / Freeze mode) 가 가능하게 됩니다. 슬레이브들은 자신의 마스터로부터 Sync명령을 수신하면 Sync mode 로 진입하게 되는데, 그 순간 모든 Output은 현재 상태로 동결되게 됩니다. 이 후의 데이터 전송이 계속 되도, 슬레이브들은 그 Output 데이터를 자신의 내부에 저장할 뿐 실제 Output상태는 변하지 않습니다. 이 저장된 Output정보는 다음 Sync 명령이 수신돼야만, 실제 출력에 전달 되게 되며, 이 Sync mode는 Unsync 명령을 통해서 종료되게 됩니다. 이와 유사하게, Freeze명령을 통해서 해당된 슬레이브들은 Freeze mode로 진입하게 됩니다. 이 mode에서는 Input의 상태가 Freeze명령 수신 당시의 현재 값으로 동결되게 되고, 다음 Freeze 명령이 수신되기 까지 Update 되지 않습니다. 이 Freeze mode는 Unfreeze 명령에 의해 종료됩니다.
- Protection Mechanisms
DP에는 Security 와 Reliability 를 위한 효율적인 보호기능이 있습니다. 즉, parameterization errors 나 전송장치의 고장 등에 대한 보호장치가 마스터와 슬레이브에 모두 존재합니다. 마스터에는 Data_Control_Timer를 통해 슬레이브의 데이터 전송을 모니터링 하는 기능이 있습니다.
이 Timer는 국당 한 개씩 존재하는데, 이 Timer의 시간 간격 내에 해당 국의 데이터 전송이 이루어 지지 않으면, 마스터는 가동상태를 중지하고,
그에 속한 모든 슬레이브국의 Output을 fail-safe 상태 즉 CLEAR status로 만들게 됩니다.슬레이브에서는 마스터나 전송라인의 고장을 검출하는 Watchdog control 기능이 있습니다. 만일 Watchdog control interval 내에 데이터 전송이 이루어 지지 않으면, 그 슬레이브의 output은 모두 fail-safe status로 들어 가게 됩니다.
Device Engineering
Profibus Device 들은 각각 상이한 성능을 가지며, 또한 그 사용 가능한 기능 ( I/O 크기, 진단 메시지 등) 및 사용가능한 Bus parameter에 따라 그 특성들도 다르게 됩니다. 이러한 파라미터들은 각 Device의 Type 및 Vendor에 따라 상이하며 통상적으로 기술적 문서로 제공되게 됩니다. Profibus에서는 이러한 Device의 통신특성을 Electronic device datasheet (GSD files)에 정의하게 함으로서 간단한 Plug and Play configuration 이 가능합니다. 이러한 GSD file에 기반한 강력한 Configuration Tool을 통해 서로 다른 Vendor의 기기로 구성된 Profibus 네트워크를 손쉽게
Configuration 할 수 있습니다.

